Mechanické chapadlo
Představujeme vám model Mechanické chapadlo, modul, který je ideálním doplňkem pro projekty jako je robotická ruka, pojízdný robot nebo věžový jeřáb. Stejně jako u ostatních modelů, i chapadlo je navrženo tak, aby co nejefektivněji demonstrovalo základní mechanické principy.
Celá sestava se skládá ze 45 dílků.
Šnekové soukolí a pohyb kleštin
Jádrem chapadla je robustní šnekové soukolí a důmyslný převod, který zajišťuje pevné a synchronizované uzavírání.
- Ovládání: Celý mechanismus se uvádí do pohybu otáčením hřídele šneku (nebo, pokud modul propojíte s motorem, elektronicky).
- Přenos síly: Rotace hřídele šneku otáčí dvěma protilehlými ozubenými koly.
- Výsledný pohyb: Ozubená kola jsou spojena s rameny chapadla. Otáčení kol způsobí, že se kleštiny chapadla pohybují synchronně proti sobě a pevně uchopí daný předmět.
Díky principu šnekového soukolí má chapadlo vysoký moment a samozamykací vlastnosti, což znamená, že kleštiny zůstanou uzavřené i bez neustálého přívodu energie.
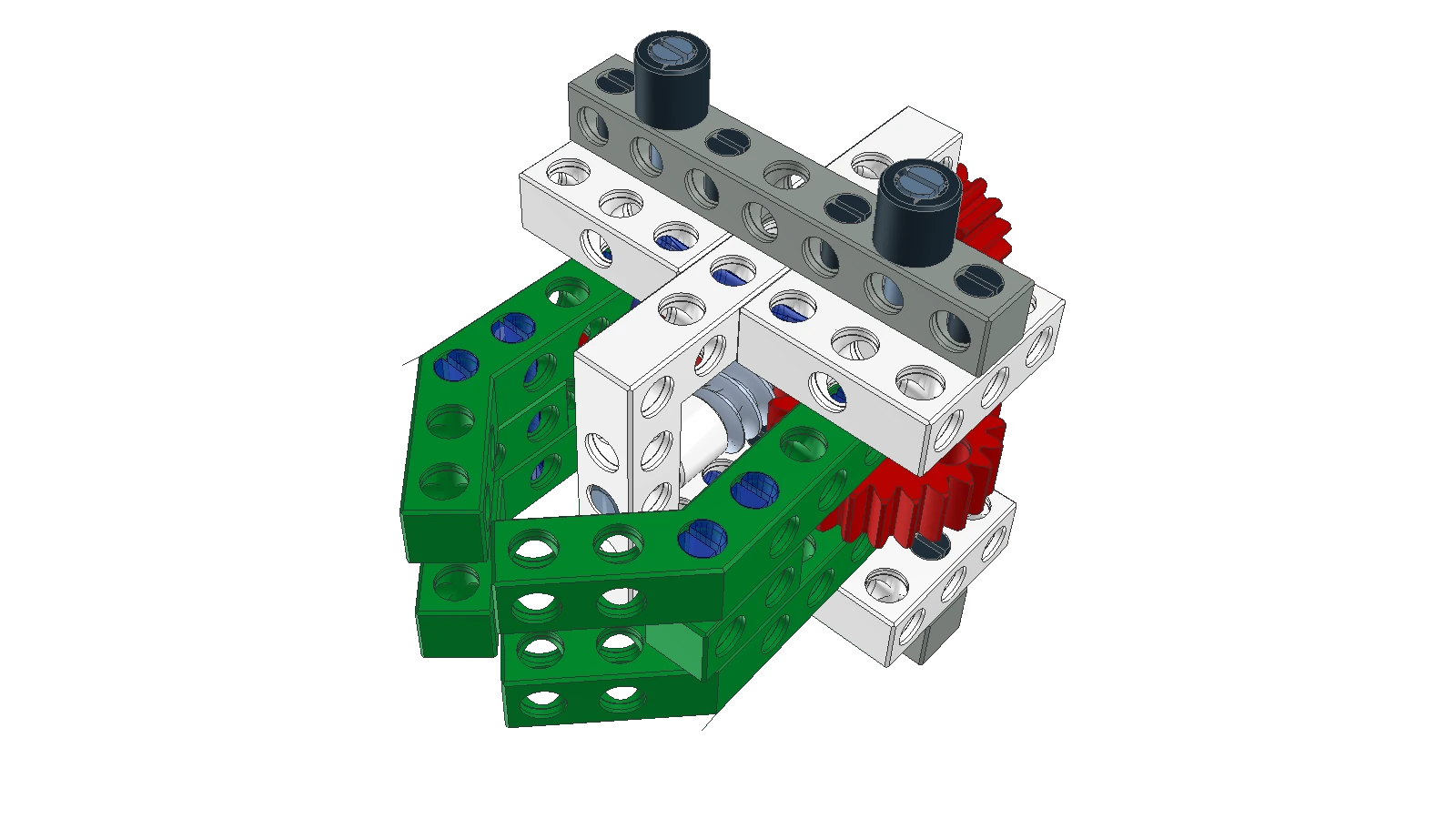
Vizualizace sestaveného mechanického chapadla.
Tiskové doporučení
Kostičky a nosníky doporučujeme tisknout ze standardních materiálů, jako je PLA nebo odolnější ABS/ASA. Pro ozubená kola ve šnekovém soukolí se nejlépe hodí PLA. Jako obvykle doporučujeme tisknout hřídele a spojovací kolíčky z PET-G pro zajištění pevnosti a hladkého chodu mechanismu.
Technické parametry
| Parametr | Hodnota |
|---|---|
| Délka | 94 mm |
| Šířka | 56 mm |
| Výška | 66 mm |
| Hmotnost | 42g |
| Nosnost | Desítky gramů (v závislosti na uchopení) |
| Ovládání | Manuální / Elektronické (připojením motoru) |
| Počet dílků | 45 |
Instrukce k sestavení Mechanického chapadla je k dispozici v PDF souboru gripper.pdf.
Upozornění
Chapadlo není dimenzováno na přenášení vysoké zátěže. Ačkoliv je konstrukce stabilní, maximální nosnost (desítky gramů) závisí na typu uchopeného předmětu, jeho geometrii a povrchu. Nepřetěžujte mechanismus. Špatným ovládáním motoru může být motor poškozen, pokud nebude včas vypnut.
Disclaimer
Zříkáme se zodpovědnosti za jakékoliv škody vzniklé při montáži nebo provozu.